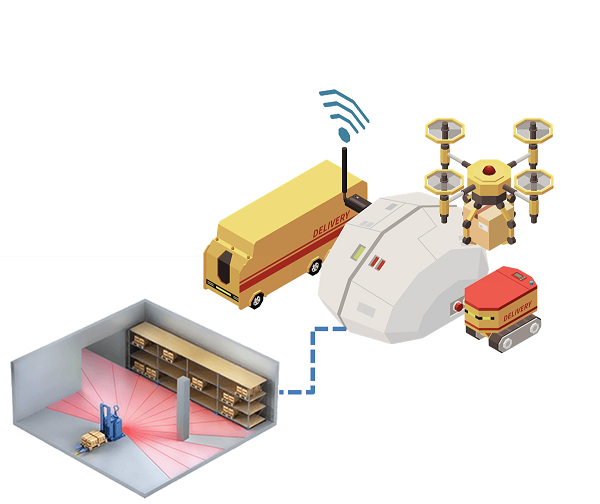
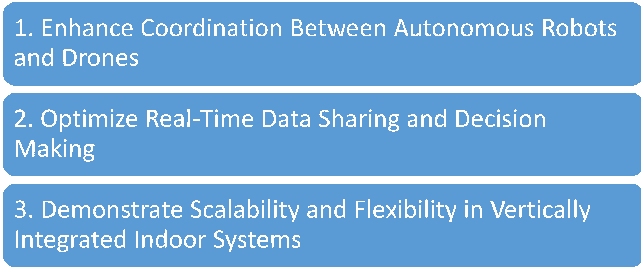
Challenge: Establishing reliable communication protocols that function efficiently across various environments (e.g., indoors, outdoors, and in the presence of interference).
Challenge: Synchronizing movement and actions between heterogeneous systems with differing capabilities (e.g., ground robots vs. aerial drones).
Challenge: Dealing with latency in communication networks that could disrupt coordination.
Challenge: Handling the large volume of sensor data generated by multiple autonomous agents in real time.
Challenge: Developing algorithms capable of fast, intelligent decision-making without requiring human intervention.
Challenge: Mitigating the risks of inconsistent or inaccurate data that may lead to errors in decision-making or execution.
Challenge: Designing a framework that can adapt to increasing numbers of robots and drones without degradation in performance.
Challenge: Ensuring compatibility and integration with diverse hardware and software systems used in different industries.
Challenge: Maintaining stability and control in complex, dynamic environments as the number of autonomous agents grows.
Team Lead
Dr. Venkatesh Deshmukh
venkatesh.deshmukh@nmims.edu
Team Members
Sunny Nanade
sunny.nanade@nmims.edu
Amey Raut
amey.raut@nmims.edu
Ainal Abdul Azeez
ainalabdul.azeez@nmims.edu